Behind the scenes | Scenario-based simulation
Powered two-wheelers (PTWs) are a major concern in road safety. Despite being a small portion of road users, PTWs have the highest fatality rate among vulnerable road users. They are 9 to 30 times more likely to be killed in a traffic crash than drivers. In Europe, road accident numbers are decreasing, but the decrease is not as strong for accidents involving PTWs compared to accidents involving other vehicles (MUSE, 2019).
Accidents involving PTWs and passenger cars mostly happen at junctions. One common scenario is when a left-turning road user collides with a road user coming from the opposite direction. Studies show that 90% of these accidents are caused by the left-turning vehicle, with PTWs being the oncoming participant. In urban areas, 79% of left turn accidents involving PTWs occur. The speed difference between PTWs and passenger vehicles in these scenarios leads to more severe injuries. Surprisingly, explicit view obstruction is not a major factor in these accidents. Instead, it is often due to vehicles not noticing or misjudging the presence of PTWs (CMC, 2021).
This emphasizes the need for technology support to inform drivers of oncoming PTWs and intervene in critical scenarios to prevent accidents. Based on these insights, our simulation aims to demonstrate the potential benefits of a driver assistance system that can effectively prevent accidents in this specific scenario.
Scenario description
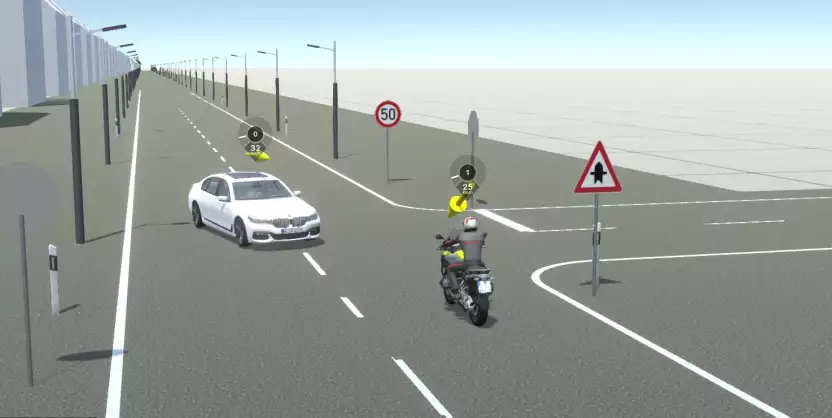
The videos feature two exemplary cases from the openPASS simulation tool (open Platform for Assessment of Safety Systems). Both cases involve a passenger car and a motorcycle approaching an intersection. In the first video, which is a baseline simulation, the car does not have any warning or intervention system. The scenario shows that a collision is narrowly avoided due to the quick reaction of the motorcyclist. Many other baseline simulation runs also include collisions between the motorcyclist and the car.
The second video, which is a treatment simulation, shows the car equipped with a system that can intervene in such scenarios. The two vehicles approach the intersection, and the car turns left. In this case, the system in the car detects the motorcyclist and performs a braking manoeuvre to prevent a collision. The video highlights the sensor detection area of the system with blue lines.
Baseline car
Treatment car
Baseline motorcyclist
Treatment motorcyclist
Behind the scenes at BMW
BMW has done the work shown here as part of Work Package (WP) 6, in which the safety assessment framework is applied to different use cases. BMW leads WP2, responsible for defining the safety assessment framework.
In WP3 BMW contributes to the simulations with models for road user behaviour. Their Stochastic Cognitive driver Model (SCM) was adapted for this use case. This paper, Modelling driver behaviour in critical traffic scenarios for the safety assessment of automated driving, aims to demonstrate that the SCM acts realistically in different critical real-world traffic scenarios.
BMW’s involvement in WP5 focuses on providing the simulation structure and models. The tool openPASS was used to simulate the use case.